xylem‘s Design Overview¶
Motivation¶
What is the motivation for developing xylem as a new tool as opposed to updating rosdep?
rosdep was originally designed for use with rosbuild and both code and command line interface are structured for that purpose. The notion of stacks, packages and manifests where rosdep keys were defined at a stack level is deeply baked into the design. Later adaptations to work with catkin were bolted on to that design in a suboptimal way and it became increasingly hard to extend rosdep with new features. Thus, rosdep has a lot of unused or overly complicated code.
Moreover, rosdep is currently linked tightly to several other ROS tools like bloom, such that even minor changes in rosdep can have deep ramifications in the tool chain. Due to this fragility, releases are slow and infrequent. Moreover, rosdep is not modular enough to facilitate extensions through third-party python packages. Together, all this implies that it is extremely difficult to improve rosdep, implement new features, and get them released.
Therefore it was concluded that it be more efficient to start fresh, borrowing ideas and code from rosdep, but designing it the way it should be rather than the way it used to be. Hence, xylem was born.
Goals¶
xylem is supposed to supersede rosdep as a package manager abstraction tool that can be used to install dependencies on any supported platform in a uniform manner. In particular, the goals of xylem are the following.
Separation of concerns¶
xylem addresses one of the key shortcomings of rosdep, namely its tight coupling with other ROS tools, with a modular design that considers the following building blocks.
- A core library that provides the infrastructure to read in rule files, resolve keys depending on the user platform and invokes package managers to install the desired software.
- A set of plugins that provide specific functionality:
- operating system support (e.g. Ubuntu, OS X, cygwin)
- installers, e.g. package managers (e.g. APT, PIP, Homebrew), but also for example the source installer.
- frontend input of keys (e.g. directly from the command line or by parsing a directory of ROS packages)
- rules specification (e.g. rules files or released ROS packages from rosdistro)
- default sources (e.g. additional default rules files from robot vendors)
- command verbs (e.g. xylem install, xylem update)
xylem comes with default plugins for all of the above points of extension.
Extensibility¶
Plugins should be able to extend the core tool from within other Python packages, such that extensions can be made without the need to touch the core package. This allows extensions to be developed and distributed somewhat independently of xylem releases. General purpose plugins that have proven to be useful to a range of users should be considered for inclusion into the core library.
Independence from ROS¶
One aim with designing xylem in a modular and extensible way is allowing it to be completely independent from ROS. In particular the core library should not have any ROS specific special cases or assumptions. Any functionality that is specific to ROS should be implemented as plugins, and possibly distributed as a separate package xylem-ros.
The ways in which rosdep is currently tied to ROS are:
- Frontend input, for example by scanning a directory for ROS packages and checking / installing their dependencies.
- Extracting resolution rules from rosdistro information.
- API access from tools like catkin, bloom or catkin_lint.
- Use of other ROS specific packages, e.g. rospkg.os_detect.
Replace rosdep¶
One aim for xylem together with its ROS specific plugins is to provide a full future replacement for rosdep. This entails providing command line tools to check and install dependencies of ROS packages as well as providing an appropriate python API that allows tools such as catkin or bloom to query xylem for dependency information. We do not aim at backward compatibility at the CLI or API level, but at the level of provided features.
In particular, this also means that the keys currently specified in package.xml files of ROS packages should continue to work with xylem (for non-EOL distributions at the very least).
Full backward compatibility in particular to EOL tools such as rosbuild does not have to be achieved.
Consider improvements¶
The design of xylem should consider the known limitations of rosdep and improve beyond the functionality of rosdep. While proposed enhancements possibly are not implemented right away, it should be ensured that future extensions allow their realization without the need to break backwards-compatibility or for heavy redesign.
The following list of exemplar improvements is not necessarily exhaustive, nor definitive. More details on some of these ideas can be found further blow.
- improve rule files
- smaller backwards-compatible changes, mostly syntactic sugar for less repetition for different platforms (any_version, any_os) [details]
- support ranges of versions and definitions for versions greater or equal to a specific version [details]
- support options to OSs and condition rules on them [details]
- support package versions in rules files, e.g. parsed from package.xml files [details]
- support different types of dependencies such as test dependencies
- consider precedence of conflicting rules [details]
- inter-key dependencies [details]
- support package manager sources (e.g. PPAs for APT on Ubuntu) [details]
- support package manager prerequisites (such as PM is installed, PM cache is up-to-date, correct PPA is installed) [details]
- support multiple resolution alternatives on the same platform with sensible defaults as well as user-configurable arbitration between them (e.g. macports vs homebrew, apt vs pip) [details]
- configure source/cache location and supply working cache with installation [details]
- configure package manager plugins from config/cli (e.g. whether to use sudo or not, supply additional command line arguments) [details]
- support concurrent invocations of xylem, in particular the update verb for tools such as bloom running in parallel. [details]
- support automatic cache updates (integrate update with native package manager, cronjob, ...)
- support virtual packages and/or A OR B logic
- support derivative operating systems (e.g. use Ubuntu rules on Ubuntu derivatives if no specific rules are available) [details]
- warn users when xylem is out of date [details]
- version the rules database and force update on version changes
- improve situation on Windows
- support proxies for any downloads as well as for the installer invocations, see ros-infrastructure/rosdep#335
- support package managers with options (such as formula options on homebrew, use flags on gentoo?)
Anti-Goals¶
xylem does not aim to replace package managers or package software itself. While support for package-manager-less platforms can be achieved with installer plugins such as the source installer, it is not an objective of xylem to systematically maintain such installation scripts.
Supported platforms¶
xylem aims to support at least the following platforms (which is what rosdep currently supports) with their native package managers
- arch (pacman)
- windows/cygwin (apt-cyg)
- debian (apt)
- freebsd (pkg_add)
- gentoo (portage)
- opensuse (zypper)
- osx (homebrew, macports)
- redhat (yum)
as well as the following language-specific cross-platform packages managers
- ruby (gem)
- python (pip)
and a platform independent source installer:
- source
On the wish list is better support for Windows, but it is unclear how this could be achieved.
Plugins¶
In order to be modular and extensible by independent Python packages, xylem uses the Entry Points concept of setuptools. The following discusses the pluggable parts of xylem laid out above in more detail.
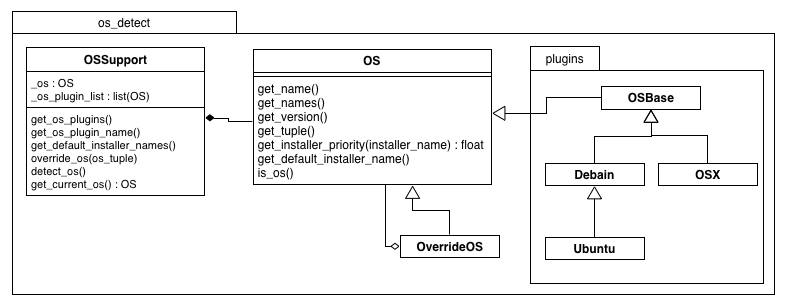
OS support¶
Operating system support includes:
- detecting if current OS matches the OS plugin
- detecting the current OS version (or codename)
- specify supported installers, default installer and installer order of preference
OS plugins are derived from xylem.os_support.OS and xylem.os_support.OSSupport manages the list of os plugins as well as the current (possibly overridden) os. xylem.os_support.OSSupport is high-level API, but not necessarily used directly, but rather inside xylem.installers.InstallerContext
Notes:
- At the moment OS support plugins are not able to list all versions,
but only ever detect the current version. The advantage is that no
code update is necessary for each new OS release. The disadvantage is
that the list of versions is not available e.g. to verify the
structure of rules files or to distinguish between package manager and
version names in rules definitions.
- Nikolaus: I think we should leave it like that for now.
- For each OS plugin we have to choose if we use numbers or code names
to specify versions. In general we try to use version code-names if
possible. Version numbers have the disadvantage of being less
memorable and some care needs to be taken because YAML might parse
version numbers as floats, not strings. Codenames for some operating
systems have the disadvantage that they are not in alphabetical order
(e.g. OS X, debian), meaning the rules definition mappings in YAML are
not in the chronological OS version order. Moreover, without the OS
plugins listing the existing versions, version ranges cannot be
specified because the order of versions is in general unknown. One
might want to support shortcut notation in rules files like ubuntu:
"lucid - oneric": foo-pkg.
- Nikolaus: I’m not sure what we can do about this without listing the known OS versions. Even if they are known, we would need to have this information for formatting and verifying rules files (order of version dict).
- Should are OS configuration like registered installers and installer
order of preference always per-OS as is in rosdep, or do we
possibly need optional per-version distinction for these?
- Nikolaus: I believe per OS is fine for now.
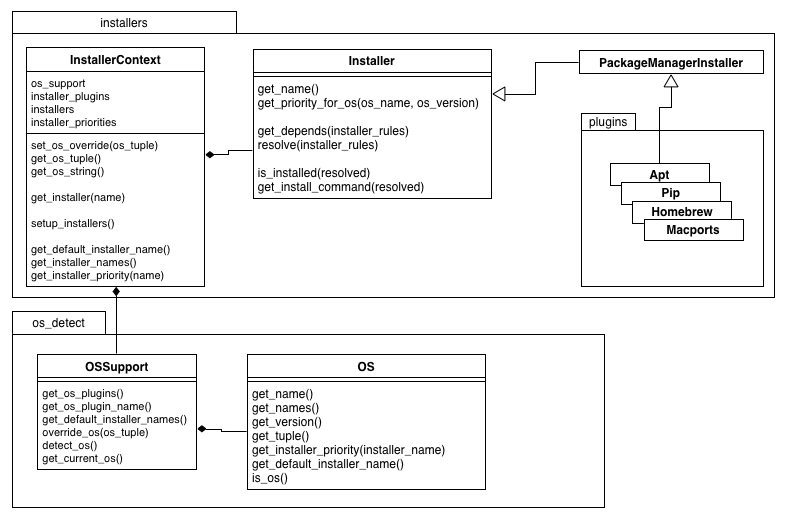
Installers¶
The supported installers are defined as plugins such that support for new installers can be added by external Python packages. Installers typically represent support for a specific package manager like APT, but not necessarily, as is the case for the source installer. The minimal functionality an installer needs to provide is:
- check if specific packages are installed
- install packages
Installer plugins are derived from Installer. The list of known installer plugins is managed by a high-level API context object, the InstallerContext. The InstallerContext uses OSDetect to manage the detected/overridden OS.
setup_installers() uses information from user configuration, os plugins and installer plugins to prepare the list of installers for the current os, their priorities, as well as the default installer. The idea is that information about which installer is used when multiple possible resolutions exist can come from different sources. In the default case, OS plugins specify which installers are used on that plugin (including a order of preference through priorities and a default installer). On top of that platform independent installer plugins can declare to be used on specific OSs (e.g. all OSs). This allows to write new installer plugins (e.g. for go get) that are available on platforms without touching the os plugins. Lastly, the user config can override all of that (available installers as well as their priorities).
The following are ideas for additional functionality of installer plugins. It is not quite clear how they are formalized in code. Maybe just methods that may be defined (duck typing or ABC mixin style). Some of these (like support for options) can be done transparently (as is done for homebrew in rosdep), but some require interaction with other components (e.g. uninstall, native reinstall, versions).
- support uninstall
- e.g. source installer does not support this
- support native reinstall
- Use the pm’s native reinstall command as opposed to uninstall+install
- Nikolaus: is this ever useful?
- support to attempt install without dependencies
- this would be needed for a specified-only option to the install command.
- Nikolaus: not sure if we need this at all.
- support package versions
- check which version of package is installed
- check if installed package is outdated
- upgrade installed package to latest version
- (install specific version of package)
- support cache update
- check if package manager cache is outdated
- update cache (like apt-get update) or provide instructions for user how to update pm
- support options
- some package managers additional options supplied when installing a package (homebrew, gentoo (use-flags)?)
- pass correct options to installer
- check if options for installed package satisfy the requested options (e.g. they are superset)
- native dependencies
- list all package manager dependencies of specific packages
- the idea is that we let the package manager install the dependencies and only issue the install command for the necessary leafs
- Nikolaus: do we need this?
Notes:
- We need to allow the configuration to completely disable installers (for specific os), e.g. disable macports on OS X (in favour of homebrew).
- Can we change the default resolution on OS X based on which of PM (macports, homebrew) is installed? With that the resolution depends on the system state, which is maybe not so nice.
- See http://www.ros.org/reps/rep-0112.html and http://www.ros.org/reps/rep-0111.html
Frontend input¶
It needs to be possible to extend the way the user passes keys to be resolved to xylem. The basic usage would be directly passing a list of keys on the command line or API function. Another input would be parsing of ROS packages and checking the package.xml files. Another one would be a new file format .xylem, which allows non ROS packages to specify dependencies for convenient installation.
Notes:
- Nikolaus: I’m not sure yet how exactly those plugins would look.
- Implementing these as new command verbs gives ultimate flexibility, but on the other hand it makes much more sense if the standard commands like install or check can be extended. E.g. ROS support plugins for xylem should be able to provide an option like --from-path for the install verb.
- For compatibility of different frontends there are the following
ideas:
- Either the desired frontend has to be specified at the command line, e.g. xylem install --frontend=ros desktop_full --rosdistro=hydro, xylem install --ros --from-path src,
- or the frontends register command line options that are unique, e.g. xylem install --rospkg desktop_full, xylem install --ros-from-path .,
- or xylem can work some magic to find out which frontend the user desires, i.e. it determines if the input from the positional command line arguments consists of keys, directories, or ROS-packages. For directories is checks if they contain ROS packages with package.xml files or .xylem files. There is an order on which frontend takes precedence, which can be overwritten by explicitly specifying the frontend.
- Nikolaus: This last alternative might make for the best just works user experience, but needs to be carefully thought through in order to not appear confusing.
Rules specification¶
The rosdep model for the definition of rules is configured in source files (e.g. 20-default-sources.yaml) that contain the URLs of rules files (base.yaml). Multiple source files are considered in their alphabetical order. Having multiple files allows robot vendors to ship their own source files independently of the base install and also allows to organize the base rules files (e.g. one file for all python packages rules). xylem will be using a similar format of source files listing rules files, with some (mostly) backwards- compatible (and already implemented) changes to the rules file format (any_os, any_version, see xylem Rules files). spec plugins can define new types of specifications for rules. The source files indicate which spec plugin to use for each entry. Right now we can foresee the following cases that might come as new spec plugins:
- New rules file format that is not compatible with the existing format.
- This would work in a very similar fashion to the initial RulesSpec spec plugin.
- Rules derived from rosdistro.
- This rules spec uses the rosdistro package to derive rules for each ROS distro.
The design for the rules sources and spec plugins is as follows:
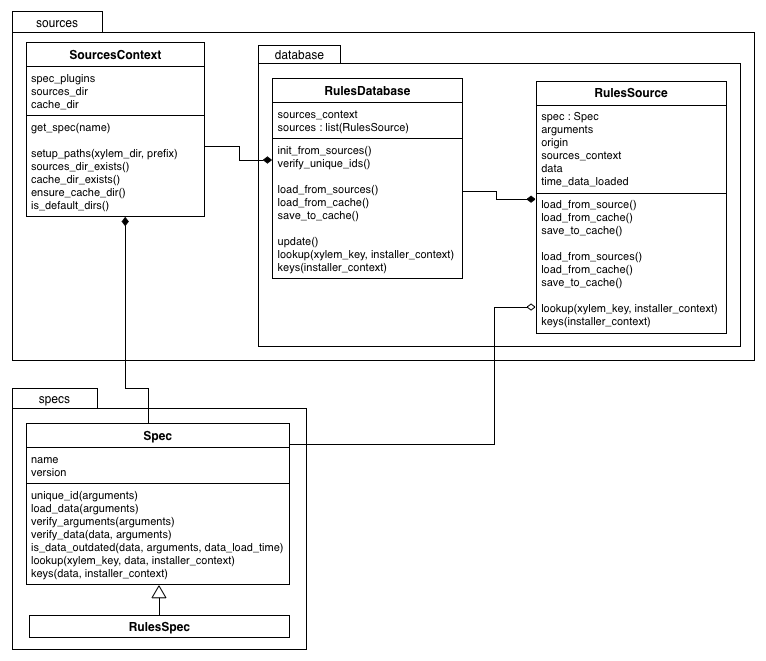
Spec plugins derive from Spec. They define how rules are specified and at the core provide load_data and lookup methods. The plugin for rules files is RulesSpec
A SourcesContext object manages known spec plugins as well as the location of source and cache files (default: /etc/xylem/sources.d/ and /var/cache/xylem/sources). Those locations can be either configured by specifying a prefix (for FHS comaptible folder layout) or a xylem_dir (for layout suitable for in-home-folder configuration).
The source files are ordered mappings of spec plugin names to arguments. In the case of the default Rules spec plugin the arguments are simple the rule file URL. For example:
# Latest rules in new format
- rules2: 'files://latest/rules/using/new/rules/format/base.yaml'
# Existing rules in legacy format
- rules: 'https://github.com/ros/rosdistro/raw/master/rosdep/base.yaml'
- rules: 'https://github.com/ros/rosdistro/raw/master/rosdep/python.yaml'
- rules: 'https://github.com/ros/rosdistro/raw/master/rosdep/ruby.yaml'
- rosdistro:
rosdistro_url: 'https://github.com/ros/rosdistro...'
use_ROSDISTRO_URL: yes
some_more_optional_arguments: '...'
A RulesDatabase is initialized given a SourcesContext. It loads all source files to create an ordered list of RulesSource objects. Each RulesSource references the according spec plugin and arguments from the entry in the source file. Moreover, cache and meta data are managed by these objects. The data (== rules specifications) in the RulesDatabase can be loaded by invoking the spec plugins. Data and meta information can be saved to and loaded from cache. During lookup, all RulesSource objects are considered in order and the result merged. lookup returns a dictionary mapping installers to installer rules. The installer priority determines which of the returned installers is chosen.
A few simplified code examples to illustrate how this all comes together:
def update(prefix=None):
sources_context = SourcesContext(prefix=prefix)
sources_context.ensure_cache_dir()
database = RulesDatabase(sources_context)
database.update()
def lookup(xylem_key, prefix=None, os_override=None):
sources_context = SourcesContext(prefix=prefix)
database = RulesDatabase(sources_context)
database.load_from_cache()
ic = InstallerContext(os_override=os_override)
installer_dict = database.lookup(xylem_key, ic)
return installer_dict
def resolve(xylem_keys, prefix=None, os_override=None, all_keys=False):
sources_context = SourcesContext(prefix=prefix)
database = RulesDatabase(sources_context)
database.load_from_cache()
ic = InstallerContext(os_override=os_override)
if all_keys:
xylem_keys = database.keys(ic)
result = []
for key in xylem_keys:
installer_dict = database.lookup(key, ic)
if not installer_dict:
raise LookupError("Could not find rule for xylem key '{0}' on "
"'{1}'.".format(key, ic.get_os_string()))
rules = []
for installer_name, rule in installer_dict.items():
priority = ic.get_installer_priority(installer_name)
if priority is None:
debug("Ignoring installer '{0}' for resolution of '{1}' "
"because it is not registered for '{2}'".
format(installer_name, key, ic.get_os_string()))
continue
if 'priority' in rule:
priority = rule['priority']
installer = ic.get_installer(installer_name)
resolutions = installer.resolve(rule)
rules.append((priority, installer_name, resolutions))
if not rules:
debug("Could not find rule for xylem key '{0}' on '{1}' for "
"registered installers '{2}'. Found rules for "
"installers '{3}'. Ignoring from 'all' keys.".
format(key, ic.get_os_string(),
", ".join(ic.get_installer_names()),
", ".join(installer_dict.keys())))
else:
rules.sort(reverse=True)
result.append((key, rules))
return sorted(result)
Notes:
- Should we consider allowing for the possibility of loading parsed (and
pickled) rules databases with the update command (for increased
speed of update)? Here the original rules files would always be
specified, but a binary version can be additionally added (somewhat
like in homebrew all formula need to specify the source to build them,
but some can additionally provide the binary package as a bottle).
- Nikolaus: I believe it actually has little value at the moment.
- Should rules plugins include an abstraction to tell if the database is out of date (for a specific URL)? Something like comparing the last- changed timestamp of the cached databased with the last-changed timestamp of the online rules file. This might be used to speed up update and also to determine whether to remind the user to call update.
Considered design questions:
- When are the different rules sourced merged (including arbitration of precedence)? During update, or while loading the cache database for resolution? Do we keep all possible resolutions in the database, or only the one that takes highest precedence?
- How is order of precedence defined between different rules plugins? Only by the order of the rules files? Do platform support plugins play a role in defining the precedence of different installers on a per-OS or per-version basis? Can user settings influence the order of precedence?
- Do we only support the cache model for sources, where a static rules database is built with the update command, but no new information is generated upon key resolution? This implies that rules sources that query some other database format (rosdistro?) or online sources at resolution time are not possible. In particular the rosdistro plugin would generate a list of rules for all released packages upon update (and not on-demand upon key resolution).
- What do the rules plugins return? The parsed rules from a given file in a (clearly defined) rules database format (something like the current dict database)? In any case the returned data should be in some versioned format, to allow future extensions to that format. This is probably the same format in which xylem keeps cached the database.
Not considered for now:
- It has been considered to include source plugins that defines the format / structure of the source files. We have for now decided against it.
Default sources¶
The idea with default sources plugins is that robot vendors can provide additional default sources including prepackaged cache such that even those default sources work out of the box without initial update. How exactly this is realized is tightly related to Sources and cache location.
Commands¶
The top level command verbs to the xylem executable should be plugins. These can pretty much define any new functionality. It is not quite clear how exactly other plugins can interact with commands, e.g. frontend plugins should somehow be able to extend the install verb.
These are the core commands:
update to update the rules database
- If partial updates are supported, where only outdated rules files are pulled, there should be an option to force updating everything.
- Needs to make sure to remove stale database cache files even on partial update, which are no longer referenced from the source files. Possibly add a clean command, that wipes the cache completely.
install to install packages (resolve + dependencies + installer prerequisites checking)
- options: --reinstall, --simulate, --skip-keys, --default-yes, --continue-on-error, --specified-only (would this mean to not resolve dependencies on xylem level, or also stop possible dependency resolution of package manager, if that is even possible)
check to check if packages installed
- options: --skip-keys, --continue-on-error, --specified- only
init-config to initialize config file, sources.list.d and cache (possibly in custom location according to XYLEM_PREFIX). By default the built- in default sources / config is copied to the new location. Is a no-op with warning if sources / config is present.
options:
- --from-prefix to copy the config/sources that would be used with this given prefix
- --from-system to copy the config/sources that would be used with empty prefix
- --force to clear the config/sources even if they are present
These commands for dependency resolution could be useful:
- depends (options: --depth where 0 means no limit)
- depends-on (options: --depth where 0 means no limit)
There should also be some commands for checking how a key resolves on a specific operating system, possibly listing alternative resolutions (pip vs apt) highlighting the one that would be chosen with install. It should also be possible to determine where these resolutions come from, e.g. which source files.
- resolve -> resolve a key for os/version; no dependency resolution / prerequisites checking
- where-defined
Maybe something to query/change the configuration:
- config with the following arguments:
- --list-plugins to list all installed plugins (of all kinds)
- --list-sources list information about all sources that would be considered during update
Notes:
- we might want to steal the alias mechanism from catkin_tools, but that is maybe low priority, since xylem command invocations would be much less frequent than catkin build invocations.
- there should be some options that tell the user why some key is needed and why it was resolved the way it was resolved
Improvements over rosdep¶
In the following we elaborate on some of the concrete improvements over rosdep listed above. Some of them are far future, some should be implemented right away.
Sources and cache location¶
The xylem model of a lookup database cache that is updated with and update command is somewhat analogous to apt-get. By default a system-wide cache is maintained that needs to be updated with sudo. We assume that many developer machines are single-user and/or are maintained by an admin that ensures regular update invocations (e.g. cronjob).
On top of the general scenario the following specific use-cases need to be supported with regards to the database cache:
- xylem needs to allow users to maintain their own cache in their home folder and use xylem independent from the system-wide installation and without super user privileges.
- Robot vendors need to be able to add to the default sources independently from the core xylem install and without post- installation work.
- xylem needs to be functional out of the box after installation. update requires internet connectivity, which is not given in some lab/robot environments. Therefore we need to make sure that xylem can be packaged (e.g. as debian) with a pre-generated binary cache. This needs to be possible for the default sources bundled with xylem as well as vendor supplied additional source files.
- Tools like bloom need to be able to create temporary caches independent from the system wide install and without super-user privileges.
We propose the following solution:
- Firstly, we assume that each URL/entry in the source files has it’s own binary database cache file, all of which get merged upon lookup.
- The user can specify the XYLEM_PREFIX environment variable (overwritten by a command line option, maybe --config-prefix or -c). By default an empty prefix is assumed.
- The cache will live in <prefix>/var/cache/xylem and the sources in <prefix>/etc/xylem/sources.d/. I.e. the default system wide cache/source location is /var/cache/xylem / /etc/xylem/sources.d, but the user can configure it to locally be e.g. ~/.xylem/var/cache/xylem / .xylem/etc/xylem/sources.d.
- A xylem installation comes bundled with default source files and default cache files. However, in particular the cache is not installed into the /var/cache location directly.
- The init command installs the default sources and default cache into the corresponding locations. There are command line options to copy existing sources/cache from another prefix, but by default the built-in files are used. The source files are only installed if they are not present. The cache files are only installed, if the corresponding source file was either not present, or was present and identical to the default. Existing cache files are not overwritten. There is a flag (maybe --force), that causes it to overwrite the default files (sources and cache). Additional source files/cache files are not overwritten.
- init is called as part of the post-installation work at least for debians, maybe also pip? Note that this does not require internet connection and sets up a working config and cache.
- The default source files could be handled as conffiles in the debians, such that they are updated upon apt-get upgrade, where the user is queried what should happen if he has changed the default sources.
- update does not automatically use the the built-in sources if none exist under the given prefix. However, if the default source files do not exist, it warns the user and possibly tells him to call xylem init (or even offers to call it). This warning can be disabled in the settings for users that want to explicitly delete the default config files.
- Robot vendors that want to supply additional default sources can hook into init (with an entry point) and register their additional default sources as well as binary caches. All the above mechanisms work for those vendors. For example, if the additional vendor package gets installed, a subsequent post-install init does recognize the missing caches for installed default sources and installs them to ensure out-of-the-box operation. Likewise, calling update in a custom prefix after installing an additional vendor package will warn the user, that some of the default sources are not installed and urge her to call init, which will add these additional default sources (and cache files), while not touching the existing default source files from the core library.
For rosdep, there is pull request for a slightly different solution. However, what we suggest addresses some of the remaining issues:
- (re-)installing from debs does not overwrite existing cache files.
- python2 and python3 debians can be installed side-by-side (at least if the default source files are not handled as conffiles)
Notes:
Should it be sources.list.d or sources.d? Note that we probably change the source files from .list to .yaml, so does sources.list.d still make sense?
Can we ensure that the binary (pickled) database format is compatible between python2 and python3?
If the default files have been updated, and the user updates the xylem installation, init will not change the existing default sources. Do we need to / can we detect if they are unchanged and replace them automatically if they are unchanged? If they are changed, ask the user what to do (like debian conffile).
Do the API calls respect the XYLEM_PREFIX environment variable or need explicit setting of a prefix parameter? I think the latter.
Dirk: For rosdistro we actually do the first approach - the environment variable ROSDISTRO_INDEX_URL is also used for API calls (if not overridden by passing a custom index url). I think that approach has the advantage that any tool using rosdistro will use the custom url when it is defined in the environment.
Wouldn’t it be kind of unexepcted if the command line tool xylem uses the prefix from the environment but a different tools like bloom falls back to a different default? Then you would also lack a way to override the prefix for any tool using the API (or that tool would need to expose a custom way to override the prefix).
It was mentioned that the debian install needs to work out-of-the-box “without any post-installation work”. Why exactly? Is post-install work (like calling init) ok if it does not require internet connectivity?
Maybe the system wide settings file is also affected by XYLEM_PREFIX, i.e. lives in <prefix>/etc/xylem/config?
When using a user-local cache, locations like ~/.xylem/var/cache/xylem / .xylem/etc/xylem/sources.d are somewhat suboptimal. If we want something like ~/.xylem/cache / .xylem/sources.d, we would likely need separate XYLEM_SOURCES and XYLEM_CACHE environment variables instead of or alternative to XYLEM_PREFIX.
Additional default sources could also be realized as plugins, which provide source files as well as pickled cache files.
Settings and command line arguments¶
There should be a canonical way to supply arguments to xylem. We propose a system-wide config file, a user config file and command line options. The default settings might be captured on a config file that comes with the installation (this would also give a reference for what settings are available). The order of precedence of settings specified multiple times is:
command line > user > system > default
We use yaml syntax for the configuration files, and suggest the following locations:
- system: <prefix>/etc/xylem/config.yaml
- user: $HOME/.xylem.yaml
xylem tries to avoid the use of environment variables for configuration. However, in order to allow users of tools like bloom (that make use of the xylem API) to configure xylem, without having those tools expose and pass through xylem-specific arguments, xylem uses the XYLEM_CONFIG environment variable to optionally point to a config file. There is also a CLI argument --config, with the same effect. The CLI argument takes precedence. If a custom location for a xylem config file is provided (via XYLEM_CONFIG or --config), user and system config files are ignored. In that case the order of precedence is:
command line > config file > default
All command line tools as well as API calls respect the configuration files (either user > system > default or config file > default). Default configuration can be achieved either by pointing XYLEM_CONFIG/--config to an empty file or supplying the empty string instead of a path.
Certain xylem plugins may respect environment variables, for example the rosdistro spec plugin would by default respect the ROSDISTRO_INDEX_URL environment variable.
Where it makes sense, options should be supported both by the CLI and config files.
Command line arguments can be grouped in the following way:
- global command line arguments applicable to all commands such as disable-plugins or os
- command specific command line arguments
- In order to achieve a good user experience, the command specific options should be further grouped. For example, all commands that take a list of keys as arguments, should do so in the same way, e.g. offering skip-keys)
It has to be seen if and how either or both kinds of arguments can be injected by plugins (e.g. frontend plugins inject new arguments to all commands that take a list of keys as input).
It also needs to be possible to supply arguments to the installer plugins (e.g. as-root or additional-arguments, see rosdep#307). Such options may be passed down to those plugins via the InstallerContext. The YAML format gives a lot of flexibility, but there should also be some conventions (not necessarily enforced) to ensure that the plugins name their options in a uniform way, such that it may even be possible and reasonable to pass certain options to all installer plugins.
Notes:
- Should user file be in $HOME/.config/xylem.yaml, or even $HOME/.config/xylem/config.yaml (see stackexchange.com)? What about config locations on Windows?
Inter-key dependencies in rules files¶
In general, we rely on the package manager to install dependencies for resolved keys. Dependencies between keys in rules files is at the moment only used for the interplay between homebrew and pip on OS X it seems. Should this be a general feature for rules to depend on other keys? In particular if we reactivate the source installer this would be needed. In particular when considering adding versions to the rules files, doing dependency resolution right is not quite trivial I guess.
Dependencies on other keys might be reasonable on different levels. Currently they are part of the installer section, but maybe they could be defined also at the rule level.
Notify user about outdated database¶
Ideally, if the source plugins can tell when they are outdated, we would fork a process on every invocation to check if database is out of date and inform the user that an update would be good on the next run. Maybe limit the update check to only fire if the database has not been updated for a certain amount of time (a day, a week, could be customizable).
Derivative operating systems¶
OS support e.g. for Ubuntu derivatives should be able to reuse most of the rules for Ubuntu, but maybe overwrite certain rules.
We propose to let OS plugins define a list of increasingly specific names. E.g. a Xubuntu os plugin might define the names debian, ubuntu and xubuntu. The most specific name corresponds to the OS name. It has to be considered that the version names of the less specific OSs might not match the version names of the derivative. In our example, xubuntu:trusty corresponds to ubuntu:trusty, but does not have a (released-) version correspondence in Debian. Therefore, instead of a list of OS names, os plugins specify a list of tuples of OS names and versions. A None version indicates that there is no version correspondence. In that case only any_version rules may apply to the derivative. For example, the Xubuntu plugin might return the following list of names/versions on Trusty: [("debian", None), ("ubuntu", "trusty"), ("xubuntu", "trusty")].
The lookup of rules is done in the following way: For a given list of OS names and versions, lookup happens in such a way as if it was first done based on only the names (not versions) independently for each of the specified names (merging information from all sources). Then, the most specific OS name for which some definition exists (no matter for which OS version) is chosen as the sole definition. Only then is the according OS version name considered.
For example, if we have the following rules
foo:
debian: libfoo
bar:
ubuntu:
precise: libbar
trusty: libbar
xubuntu:
trusty: libbar-x
then on xubuntu:trusty the resolutions are foo -> libfoo and bar -> libbar-x, but on xubuntu:precise the key bar does not resolve.
Versions in rules files¶
In general the user should expect a command xylem install boost to install the latest version of boost on the given system, i.e. on Ubuntu the version that apt-get install boost would install. For some package managers, like apt for a specific Ubuntu release, this might be always the same version of boost, for other package managers such as pip or homebrew, this will always refer to the latest version. This gives rise to two challenges with respect to software versions. Firstly, at any given time the key boost refers to different versions of the boost library on different platforms. Secondly, at two different points in time the key boost refers to two different versions of the boost library on the same platform. These challenges need to be taken into consideration, since the goal of xylem is to allow specification of dependencies in a uniform way that is robust over time, i.e. can be supplied as part of install instructions today and still be valid tomorrow.
At the moment, rosdep does not really consider versions, which users find confusing in particular in conjunction with ROS packages that may specify versioned dependencies (rosdep#325).
In general we assume that package managers can only install one version of a specific package at a time (largely true for apt, homebrew, pip). We also assume that we never install a specific version of a package with the package manager, but only the latest version, or possibly upgrade an already installed package to the latest version. Nevertheless, the package manager should be able to tell us, which version of a package is installed and which version would be installed/upgraded (i.e. the latest version on that platform).
For some libraries multiple incompatible major versions need to be present at the same time. Here xylem follows suite with package managers such as apt and homebrew and introduces new keys for the specific versions (as rosdep does currently). For example, for Eigen there are the version specific eigen2 and eigen3 keys, as well as a general eigen key that points to the latest version (i.e. is currently the same as eigen3).
What could be considered, is that xylem allows for input keys to be associated with version requirements (==, <=, >= etc) and then check, if the installed or would-be installed version matches. This would solve the use case with ROS packages above, where there is a one-to-one relation between xylem key and apt package. However, it is unclear how the version is handled if a key resolves to 0 or more than 1 packages. However, the most we would offer in terms of action is upgrading an already installed package to the latest version, and informing the user if a matching version cannot be achieved by upgrading or if the version requirements are incompatible themselves (i.e. user installs foo and bar, which depend on baz>1.0 and baz<1.0 respectively). Special care needs to be taken to correctly merge multiple versioned resolutions of the same key.
Another level of support for versions in rules would be to allow the resolution rules themselves to be conditional on a version, e.g. allowing to specify that eigen would resolve to libeigen2-dev or libeigen3-dev, depending on the version. With this, the versioned key eigen==2 and eigen==3 could be resolved at the same time. Things could get really complicated and I’m not sure we want to go down that route unless there is a good concrete use case where this is beneficial.
Notes:
- check how package managers deal with versions, in particular the capabilities (install multiple version of same package, install specific version of package not only latest) and syntax for versioned dependencies
- interesting blog about abstract vs concrete dependencies in python https://caremad.io/blog/setup-vs-requirement/
OS options¶
OS plugins should have options that are configured in the xylem config files. One example of such options are proposed OS “features” (another is “core installers”, see Alternative resolutions). Features can be either “active” or not. The config file contains a list of of active features (all other features are inactive). For example, let us consider the Ubuntu OS plugin. For recent Ubuntu versions there exist two alternatives for each python package, one for python 2 and one for python 3. For this example, let us assume that something similar would hypothetically be the case for Ruby 2 and 3. Now if we want to use the latest and greatest, we might therefore put in our /etc/xylem/config.yaml:
os_options:
features: [python3, ruby3]
In this scenario the Ubuntu plugin defines features python3 and ruby3 where their absence implies Python 2 and Ruby 2.
It (probably) does not make sense to define os features in a rules file (like installer options), however, the OS plugins might choose to set default features depending on OS version. For Ubuntu, python3 might be active by default starting from a certain version. We therefore might also add config options to activate or deactivate certain features (as apposed to only defining the definitive list of features).
In rules files, we allow (optional) conditioning on the features at the OS level. In a shorthand notation (which gets expanded) this might look like the following:
rosdep:
ubuntu: [python-rosdep]
ubuntu & python3: [python3-rosdep]
# note that the above is parsed as string "ubuntu & python3"
In order to keep things unambiguous, we need to ensure that in each file and for each key/os-name, only at most one rule applies to a configured set of features. In order to achieve this the list of features in os dicts are interpreted in the following way: For a given set of feature dependent os dict entries, we assume that any feature that appears in any of the entries is relevant for all entries. I.e. in the above example the ubuntu entry only applies when feature python3 is not active, because it used in the next line for ubuntu & python3. However, since ruby3 does not appear in any of the entries (in that file, for that key/os), the two rules both apply to feature ruby3 active and inactive.
While we assume that in practice for each xylem key there is at most one OS feature that is relevant, here is an example of a definition involving two features:
mixed-python-ruby-pkg-foo:
ubuntu: [python-ruby-foo]
ubuntu & python3, ruby3: [python3-ruby3-foo]
ubuntu & ruby3: [python-ruby3-foo]
# note that the above is parsed as string "ubuntu & python3, ruby3"
# python3-ruby-foo does not exist. List does not have to be exhaustive.
In the expanded rules dict, the feature conditions are organized in a binary decision tree (built from valid YAML, but optimized for lookup). Each inner node in the tree consists of a dict with at most 2 or 3 entries: feature mapping to the feature that is conditioned on in this node and one or two of active and inactive, mapping to subtrees for the corresponding decision. The leaves of the tree are version dicts. Since in practice at most one feature is relevant each key, this tree would have depth 0 or 1 for most keys. To illustrate the structure, we show the expanded definition for the example with two features:
mixed-python-ruby-pkg-foo:
ubuntu:
feature: python3
active:
feature: ruby3
active:
any_version:
apt:
packages: [python3-ruby3-foo]
inactive:
feature: ruby3
active:
any_version:
apt:
packages: [python-ruby3-foo]
inactive:
any_version:
apt:
packages: [python-ruby-foo]
For rules defintions not involving OS features the expaned definition is unchanged, i.e. the version dict comes directly underneath the OS dict.
Here os another example to illustrate the features used are checked on a per-file basis:
# 01-rules.yaml
mixed-python-ruby-pkg-foo:
ubuntu: [python-foo]
# 02-rules.yaml
mixed-python-ruby-pkg-foo:
ubuntu: [python-ruby-foo]
ubuntu & python3, ruby3: [python3-ruby3-foo]
ubuntu & ruby3: [python-ruby3-foo]
# merged result:
mixed-python-ruby-pkg-foo:
ubuntu: [python-foo]
In the above, the first file takes precedence for all cases, even though it does not condition on any features. As explained above, the unconditioned rule in the first file applies to all possible sets of active features.
Notes:
Nikolaus: I am open to suggestions for better compact syntax as well as expanded data structure.
We might also want to change the OS override syntax to specify features, something like --os ubuntu:trusty&python3.
An alternative proposal to support python 2 vs 3 rules on recent Ubuntu was using derivative OSs, but that doesn’t scale very well. Considering multiple alternatives on the same OS, like the hypothetical Ruby 2 vs 3 in the example above, is already awkward, but when this is mixed with actual derivative OSs, it scales very poorly.
Considering the examlpe above, we might define the following derivative OSs with listed names:
ubuntu => ['ubuntu'] ubuntu_py3 => ['ubuntu', 'ubuntu_py3'] ubuntu_rb3 => ['ubuntu', 'ubuntu_rb3'] ubuntu_py3_rb3 => ['ubuntu', 'ubuntu_py3', 'ubuntu_rb3', 'ubuntu_py3_rb3']Now if I want to add an actual derivative OS like Xubuntu, I would also have to add 4 variants:
xubuntu => ['ubuntu', 'xubuntu'] xubuntu_py3 => ['ubuntu', 'ubuntu_py3', 'xubuntu', 'xubuntu_py3'] xubuntu_rb3 => ['ubuntu', 'ubuntu_rb3', 'xubuntu', 'xubuntu_rb3'] xubuntu_py3_rb3 => ['ubuntu', 'ubuntu_py3', 'ubuntu_rb3', 'ubuntu_py3_rb3', 'xubuntu', 'xubuntu_py3', 'xubuntu_rb3', 'xubuntu_py3_rb3']Note that with this approach we would also have to include some setting in the config file to guide the os detection to choose the appropriate variant.
Installer options¶
Installer options configure installer plugins. They can be defined in config files or rules definitions. Definitions in the config files apply to all rules (of that installer). Definitions in rules files only apply to the rules for which they are defined. There is a shortcut to define installer options in rules files that apply to every rule. As an example we consider a set of options to the apt installer to support PPAs.
We would like to support custom PPAs for rules. With xylem being ROS- independent, the apt installer plugin has no knowledge of the ROS specific PPAs. We therefore define an option required_ppas, which maps to a list of necessary ppas. This list can be populated from xylem config files, or from xylem rules that are currently being resolved. For installation, xylem would then first check that all the required PPAs are installed and possibly offer to install missing ones, or at least give meaningful instructions to the user.
The definition in a config file might look like this:
installer_options:
apt:
required_ppas: ["ppa:osrf/ros"]
An rule in an installer file might look like this:
python-rosdep:
ubuntu:
any_version:
apt:
packages: [python-rosdep]
required_ppas: ["ppa:osrf/ros"]
Recognizing that a rules file might contain many apt rules for packages from the same PPA, rules files may contain global definitions of options for each installer. They act as if they are part of any rule of the corresponding installer. For example, the above file with the single python-rosdep entry can alternatively be written:
_installer_options:
apt:
required_ppas: ["ppa:osrf/ros"]
python-rosdep: [python-rosdep]
The leading underscore distinguishes _installer_options from xylem keys and ensures that it appears at the top of the file. Having the PPA requirement always be liked to the rules themselves is advantageous. If none of the apt rules in a file with such installer options is part of the set of resolutions of the current install command, then of course the PPA requirement is not considered.
Support for mirrors could be added as another option, e.g.:
installer_options:
apt:
ppa_mirrors:
"ppa:osrf/ros": ["ppa:freiburg/ros", "ppa:nyu/ros"]
Note that these mirrors could be defined in a config file, or again, in the rules file.
Sometimes it might be convenient to not only provide alternative PPAs, but actually replace a PPA with a different one, for example during testing. A third installer option could achieve this:
installer_options:
apt:
replace_ppas:
"ppa:osrf/ros": ["ppa:/ros-testing"]
Replacing PPAs with a list of 0 or more different PPAs also allows to completely “disable” a PPA requirement without touching the rules files.
Something similar should be done for Taps for Homebrew. While it is possible to reference the Tap with the formula name for installation (brew install osrf/ros/foopkg), which should be supported for specific packages.
Improved package manager abstraction¶
[TODO: these are only random thoughts. transform them into a coherent and comprehensible description]
- support stuff like custom ppa’s for apt, taps for homebrew
- the ros-ppa should not be special in xylem
- possibly specified on a per-rules-file basis? (identify real world use cases / needs)
- if custom ppa’s are supported, provide tools to list the ppa’s for bunch of keys / rules sources
- rules should never specify the ppa location, but rather have some sort of names prerequisite. this way the user could configure/overwrite the prerequisite in the config file if he e.g. has a customized mirror of that ppa or tap.
- issue of trust for the user (auto add alternavte pm sources? query user?)
- issue of reliability of sources for the maintainer
- tool support to ensure ROS core packages are only using ubuntu or osrf ppa?
- maybe the right abstraction is package manager prerequisites
- possibly not support undoing these prerequisites
- prerequisites should be performed before any packages is installed
- could query user or be automatic (with explicit option) or fail with instructions to user
- allow user to configure and also skip specific or all prerequisite checks.
- special prerequisite is the ‘availability’, which checks if the pm is installed. This should be treated specially, because maybe the selection of used package manager should depend on which is installed (e.g. macports vs homebrew). Ability to list available package managers
- maybe with the previous it makes sense to distinguish general prerequisites (apt is installed and possibly up-to-date) and per-key prerequisites (certain ppa is installed)
- concrete examples: * apt: ppa installed * source installer: tools installed (gcc etc) * brew: homebrew installed, Tap tapped, brew –prefix on PATH * pip: pip installed
Alternative resolutions¶
On a specific platform we want to allow alternative resolutions for the same key. By default some order on these alternatives should determine which resolution is chosen without user interaction. However, it should be possible for the user to permanently or temporarily override that order to install different alternatives.
For example on OS X we would like to offer installing packages either from macports, or from homebrew / pip / gem. Similarly on Ubuntu python packages are packaged with apt, but a user might prefer to install all or certain python packages from pip instead.
We also have to consider that information for which installers are available on each platform and what their priority is should come from multiple sources: os plugins, installer plugins and the user configuration.
We should consider the following use cases:
- The default scenario should be that the OS plugin defines a preference on supported installers such that each key is resolved uniquely in a way suitable for that platform.
- Installer plugins for platform independent package managers should be able to specify additional installers independent from the OS plugins. For example a new installer plugin for go get should be available on all platforms without the need to update all OS plugins. The installers take lower priority than the default installers for that platform. They are independent from one-another and (by default) don’t need arbitration between them. For example, the go get installer does need have a relative priority to pip or gem. Enabling support for new installers should be possible just by installing the corresponding plugin and without additional user configuration.
- Installer plugins might define installers that are supposed to be used instead of the core installers defined by an OS plugin. For example, someone might write a linuxbrew installer plugin and want to use that on Ubuntu instead of apt. In that case the installer needs to take higher priority than the OS plugin defined core installers. Requiring user configuration for this rather rare scenario is fine.
- The user wants to make a different choice for the core installers on a platform where multiple alternatives are provided by xylem. For example while by default the on OS X homebrew together with pip and gem are used, an alternative is to use macports. In that case homebrew should be deactivated completely, i.e. keys that are not provided through macports should not be installed through homebrew, and vice versa, by default keys not available on homebrew should not be installed through macports. However it should still be possible to set up xylem to use homebrew and fallback to macports, if the user desires that. Requiring user configuration for anything non default is fine.
- The user might want to specify the exact installer to use for specifc keys. E.g. while she uses apt (as per default) on Ubuntu for python packages, a given list of packages should still be installed through pip. The user might do that through config-file / command-line or custom rules file.
Initially, as described in the installer plugin section, a system of real-valued priorities for installers was devised. However it was deemed unnecessarily complex. In particular user configuration should not deal with number-valued priorities for installers.
The following therefore describes the newly proposed interplay of os plugins, installer plugins, rules files and user config to address the above use cases.
The os pluings define an ordered list of “core installers” that are used on this operating system by default. The order determines which installer is used, in case multiple resolutions for one key are available. Moreover, installer plugins may register themselves as “additional installers” for any or all OSs. To that end they define a function that takes os name and version and returns a boolean that indicates if the installer should be used as “additional installer”. E.g. installers like pip might return True for all OSs. The additional installers have arbitrary order/preference among themselves, and lower priority than any of the core installers. If for the resolution of a key there is the choice between multiple additional installers, we might want to either raise an error, or make an arbitrary choice (and possibly provide a warning). Any installers already present in the list of core installers are ignored as “additional installers”. This way of configuring core and additional installers should cover use cases 1 and 2.
The user may furthermore override the list of core installers in her config file. For example the following config file specifies that the linuxbrew installer should be used with highest precedence, and apt as a fallback, and thus supports use case 3 (see also OS options):
os_options:
installers: [linuxbrew, apt]
This still allows installer plugins to register themselves as additional installers, i.e. python packages without resolutions for linuxbrew nor apt can still be installed from pip with the above config. This last part ensures the “no config” requirement of use case 2 (i.e. allow an alternative set of core installers, while still automatically picking up additional installers from newly installed installer plugins without touching the config file).
The above also covers use case 4. In the example the OS plugin for OSX, the core installers would be [homebrew] (pip and gem are additional installers), and can be overwritten in the config file to be [macports] by a macports user that does not want to use homebrew at all. Neither macports nor homebrew would register themselves as “additional” installers. More exotically, the user might also configure [homebrew, pip, gem, macports] as core installers, to use macports as a fallback for everything not available through homebrew/pip/gem. Even with this setup, the user can take immediately use a newly installer go get installer plugin without needing to touch her config file.
To give the user ultimate control over which installers can be used, she might specify that no “additional installers” should be used. With that, the specified list of core installers is the definitive list of used installers:
use_additional_installers: False
Lastly, we support use case 5, namely overrides for specific keys, in two ways. Firstly, the user can specify a list of keys to install from specific installers either in the config file
install_from:
pip: [python-foo, python-bar]
gem: [ruby-baz]
or on the command line:
xylem install some-pkg-with-deps --install-from="pip: [python-foo, python-bar]"
This is useful to quickly choose a different resolution for some keys, where this resolution is already defined, but not the highest priority with the current installer precedence setup.
A slightly different scenario is where one wants to override the resolution for a specific key in a custom rules file and make sure that this is the only rule, not merged with rules for other installers in existing rules files. For example:
# 01-local-rules.yaml
foo:
ubuntu:
any_version:
my_installer: ["libfoo"]
# 20-default-rules.yaml
...
foo:
ubuntu:
any_version:
apt: ["libfoo"]
...
In this setup, the rules for my_installer and apt would get merged upon lookup of foo. Since apt is the highest priority installer on Ubuntu, xylem would always choose the apt rule. In order to support true overriding of specific keys in local rules files (like is currently possible in rosdep) in a way that does not require to also list those keys in a config file, we propose a special disable keyword for installer rules, which makes sure that a definition further down the line is not merged. A special any_installer entry in the installer dict can be used to disable all other installers. So in our example the 01-local-rules.yaml can be written as either
foo:
ubuntu:
any_version:
my_installer: ["libfoo"]
apt:
disable: True
or
foo:
ubuntu:
any_version:
my_installer: ["libfoo"]
any_installer:
disable: True
to achieve the desired effect.
Note that on top of the above configuration possibilities, there are also other ways in which power users might influence the list of installers. E.g. one can provide a custom os plugin and disable to one provided by xylem. The same can be done with installer plugins, to e.g. write a custom plugin for the apt installer and disable the one shipped with python. This last option allows to use all the existing rules for apt while fully customizing how the apt packages are actually installed (maybe someone wants to install all apt packages from source for some reason). Having to write and replace plugins should however not be the workflow for common use cases, which is granted by the above proposal.
Notes:
- The xylem resolve command can optionally list all alternative resolution and their order in order to debug.
- In the context of bloom, keep in mind that for debian releases only apt dependencies are allowed, whereas e.g. homebrew formulae can also depend on pip / gem).
Random points¶
- bring back the source installer
- improve windows situation; possibly source installer? windows 8 app store :-)
- integrate/interact with http://robotpkg.openrobots.org somehow? Check their solution for ideas for xylem.
- continue on error option for install
- authority on rules and versions
- restriction on the characters used in xylem keys, os names, installer names, version strings: alphanumeric, period, dash, underscore. Is this too restrictive? Reserved names such as any_os, any_version, default_installer...
- for the rosdistro plugin, there should be a more meaningful error message when an operating system is not supported (it should not just be “key not resolved”, nor should it simply try to install non- existent packages (and fail) like it does now on homebrew)
- before releasing, carefully consider security and ability for plugins to override completely what is installed from sources
- consider migration path ros-package -> system dependencies (in light of xylem supporting multiple ros distros) http://answers.ros.org/question/173773/depend-on-opencv-in-hydro/
- Look at Chef cookbook http://answers.ros.org/question/174507/is-there-interest-in-maintaining-chef-cookbooks-for-ros/
Terminology¶
[TODO: Define terms]
- xylem key
- key database
- rules file
- installer
- package manager
- platform –> os/version tuple
- installer
- installer context
- package -> pm package
- rules dict, os dict, version dict, installer dict, installer rule
- rules database (contains merged rules dict)
- rules source (entry in sources file, contains spec plugin name and data, typically url, must should have unique identifier)
- cache -> version, datetime, must be reproducible for the unique identifier